

Abstract
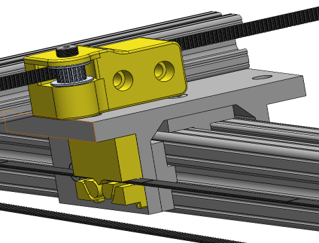
This project focuses on developing a ping-pong-playing robot to compete against a human player. Employing comparative tools like morph charts and scoring matrices, we generated and evaluated 34 design concepts. Through this systematic process, we identified the optimal design—a gantry system. Utilizing SolidWorks, we constructed a virtual design, maximizing off-the-shelf components to minimize custom parts, thereby reducing both time and cost in the design and manufacturing phases.